

این مطلب یکی از مقالات پرونده ویژه «چشمانداز فناوری در سال 2015» است. برای دریافت کل این پرونده ویژه اینجا را کلیک کنید.
راه رفتن يکی از شاهکارهای فوقالعاده مهندسی بيومکانيک است. هر گامی که روبات برمیدارد، بايد با تعادل همراه باشد و بتواند در کسری از ثانيه ناپايداری (ناشی از حرکت) خود را کنترل کند. برای اين کار بايد خيلی زود هماهنگی صورت بپذيرد که پا کجا روی زمين فرود خواهد آمد و ميزان نيروی مورد نياز برای تغيير جهت نيز بايد بهسرعت محاسبه شود. پس جای شگفتی نيست که تاکنون روباتها در اين باره عملکرد چندان خوبی نداشتهاند. حالا وقت این است که با «اطلس» آشنا شويد؛ روبات آدمنمایی که بوستون دايناميکس، شرکتی که در دسامبر 2013 به تصاحب گوگل درآمد، آن را ساخته است. اين روبات میتواند روی زمينهای ناهموار راه برود و حتی روی زمينهای هموار بدود. با اينکه روباتهای پيشين مانند آسيمو محصول هوندا و روبات کوچک QRIO ساخت سونی نيز راه میروند، اما در تنظيم تعادل خود سريع نيستند؛ در نتيجه، اغلب عملکرد خوبی ندارند و ارزش عملی آنها محدود است. توانایی اطلس در برقراری تعادل استثنایی است و میتواند خودش را بهراحتی پايدار نگه دارد و اين نشان میدهد که روباتها در آينده خواهند توانست بهصورت ايمن و بهآسانی به محيطهای انسانی نيز گام نهند. روباتهایی که بهدرستی راه میروند، سرانجام خواهند توانست در مواردی مانند عمليات فوری نجات کاربردی بسيار مؤثرتر داشته باشند. همچنين، در کمک به سالمندان يا معلولان جسمی برای انجام کارهای روزمره ايفای نقش کنند. مارک ريبرت، از مؤسسان بوستون دايناميکس، در اوايل دهه 1980 در حيطه «تعادل دايناميک» ماشينها پيشگام بود.

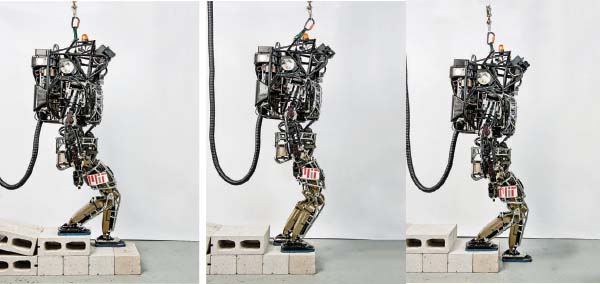
شکل1: پژوهشگران در امآیتی به رهبری سث تدريک نرمافزار تعادل دايناميک را که با روبات اطلس معرفی شده بود، در نسخه خود بهکار گرفتند. اين نرمافزار به روبات اجازه میدهد تا روی زمينهای ناهموار و ناآشنا بهنسبت سريع گام بردارد.
منظور از تعادل دايناميک، حرکت پيوسته برای سرپا ماندن است. او در مقام استاد دانشگاه کارنگی ملون روبات يکپایی ساخت که مانند چوب پای فنردار در آزمايشگاه محل کارش بالا و پايين میپريد. برای اين کار جایگيری مجدد پا و بدن روبات در هر پرش و اينکه با پرش بعدی بايد با چه شدتی روی زمين فشار وارد کند، محاسبه میشد. اطلس نيز ويژگی تعادل دايناميک دارد و بهگونهای از هيدروليک پرقدرت بهره میبرد که بتواند خودش را ثابت نگه دارد. اين روبات بیآنکه تعادلش بههم بخورد، میتواند روی تلی از آوار راه برود، روی تردميل چابک گام بردارد، و زمانیکه گوی ويرانگر 20 پاوندی به آن برخورد میکند، روی يک پا تعادل خود را نگه دارد. همان گونه که شما وقتی هل داده میشويد، تعادل خود را بهصورت غريزی نگه میداريد، وزن خود را جابهجا و برای جلوگيری از سقوط محل استقرار پاهایتان را عوض میکنيد، اطلس نيز میتواند ناپايداری خود را حس کند و بهسرعت واکنش نشان دهد تا تعادلش را بازيابد. ظرفيتهای ناشی از حرکتهای انسانوار اين روبات، آشکارا گوگل را تحت تأثير قرار داد.

شکل2: نرمافزار امآیتی به روبات اطلس اجازه میدهد در وضعيتهای فيزيکی بسيار ناپايدار نيز خود را کنترل کند و سقوط نکند.
با اينکه مشخص نيست چرا گوگل به کسب و کار روباتيک روی آورده است، اما سال گذشته هفت شرکت ديگر از جمله آنها را که تخصصشان بينایی و برزش (کارهایی که با دست انجام میشود) بود بهتصاحب خود درآورد. اطلس هنوز برای انجام خردهکارهای خانگی و اداری آماده نيست. یک موتور ديزلی قدرتمند بیرونی و پرسر و صدا دارد و دست و پاهای تيتانيومی آن بهصورت خطرناکی پيچ و تاب میخورند. میتوان از آن در محيطهای بسيار خطرناک برای انجام کارهای تعميری استفاده کرد تا راه برای ورود نيروهای اضطراری هموار شود. برای مثال، اگر اتاق کنترل يک سايت برق هستهای دچار فروگداخت شده باشد، میتوان از چنين روباتی استفاده کرد (فروگداخت به زبان ساده زمانی روی میدهد که استوانههای سوخت اتمی در اثر خرابی دستگاههای سردکن گداخته شوند و پرتوهای زيانبار بپراکنند). ريبرت اظهار میدارد اگر هدف ساختن چيزی است که همانند يک انسان باشد، شرکت متبوع او راههایی برای انجامش دارد.
بازيگران اصلی: بوستون دايناميکس، اسکافت، هوندا
چرا مهم است: بخشهای زيادی از جهان برای ماشينهای چرخدار دسترسناپذیر هستند، اما ماشينهای پادار چنين محدوديتی ندارند.
دستاورد: ماشينهای پاداری که روی زمينهای ناهموار و ناپايدار گام برمیدارند.
ماهنامه شبکه را از کجا تهیه کنیم؟
ماهنامه شبکه را میتوانید از کتابخانههای عمومی سراسر کشور و نیز از دکههای روزنامهفروشی تهیه نمائید.
ثبت اشتراک نسخه کاغذی ماهنامه شبکه
ثبت اشتراک نسخه آنلاین
کتاب الکترونیک +Network راهنمای شبکهها
- برای دانلود تنها کتاب کامل ترجمه فارسی +Network اینجا کلیک کنید.
کتاب الکترونیک دوره مقدماتی آموزش پایتون
- اگر قصد یادگیری برنامهنویسی را دارید ولی هیچ پیشزمینهای ندارید اینجا کلیک کنید.





















نظر شما چیست؟